就像动画《战神金刚》一样,将一个个小型机器人组成一个巨型机器人的想法在科幻相关的节目中很常见,而现实中的研究人员也一直在寻求实现这一目标的方法。现在,多亏了宾夕法尼亚大学的ModLab项目,模块化机器人变得更加智能化。
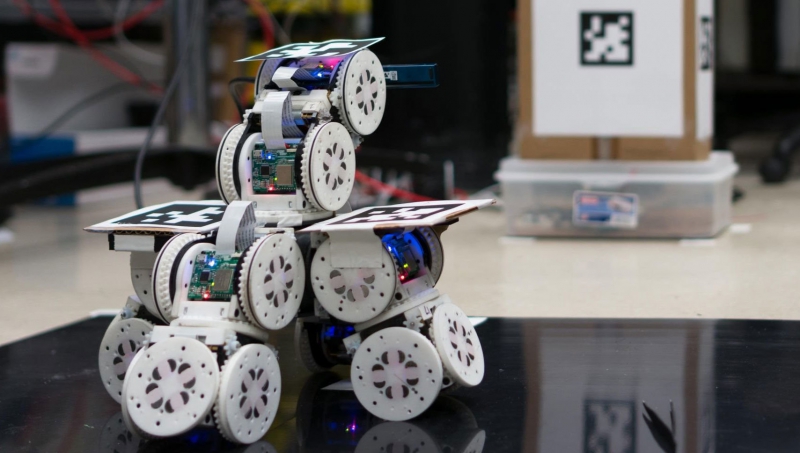
SMORES-EP机器人每侧都有轮子,可以使模块向任何方向移动,也能让各个模块通过将末端的磁铁转换成短程无线电来相互通信。每个模块都配有四个连接器,这意味着两个机器人可以以17种不同的配置连接。这就能使它们聚在一起组成一个更大更复杂的机器人。
当然,配置模块的过程也存在挑战。为了从一种形式转变为另一种形式,研究人员需要制定一个行动计划,从而使机器人从当前位置转移到它们需要到达的位置。例如,为了将行走机器人转换为带有手臂的机器人,模块之间需要以特定的方式对接和脱离。
研究人员计算出了机器人从初始状态到目标状态重新配置的最有效方法。一些配置需要模块相互协助,其中一个模块充当“助手”,将另一个模块移动到位,以便它可以停靠在新位置。而其他的配置则涉及移动一次就形成一个新形状的模块。
这样的模块化机器人具有比标准机器人灵活性和适应性都更强的优势,这意味着它们可以自我修复并应对未知环境。它们可用于太空任务和灾难救援任务,或者用作残疾人士的假肢。