如果让你来想象一个机器人,你可能会想到人形机器人或者重型工业机器人手臂。不过,麻省理工学院计算机科学与人工智能实验室(CSAIL)的教授Daniela Rus告诉《The Verge》:“而我则想看到不一样的。”
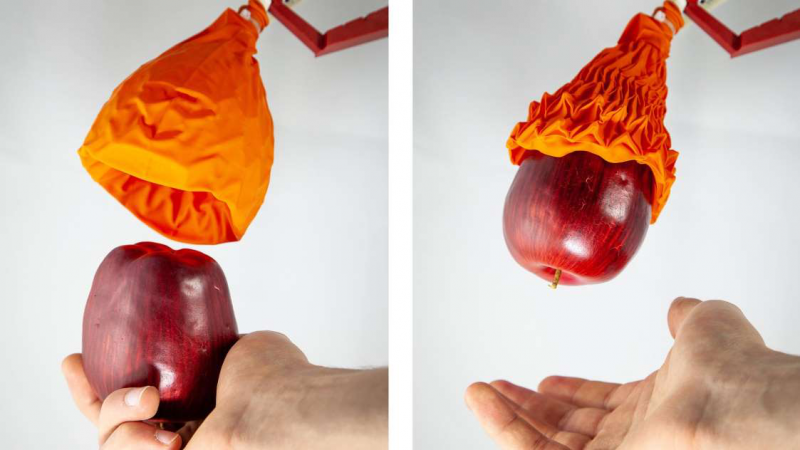
她所在的团队最新推出的机器人抓手就是个很好的例子。这个机器人手是用来抓取物品的,但是它的外观却不像正规的机器人抓手。在视觉上,它更像是一个橡胶制的郁金香花,或者一个泄了气的气球。
正是这种独特的外观使得这个抓手变得非常有用。它的橡胶皮下面是一个形状像海星的折纸骨架。当气体被泵入和排出抓手的密封外壳时,整个装置就会像花一样打开和关闭。
这个机器人手能够拾取精致的物体而不会伤害它们,同时能保持足够强的抓地力,使其能抓取是自己重量100倍的物体。Rus告诉《The Verge》:“通过将这种可折叠的骨架与柔软的外观相结合,我们可以达到两全其美的效果。我很高兴能用这种机器人手抓取物体。”
像这种柔软的机器人抓手并不新鲜。在过去十年中,这一领域早已发展繁荣,有太多工程师想要制作柔软的机器人。其中一个用例就是物流:在仓库和工厂中抓取物品。尽管这项工作大部分都是自动化的,但亚马逊等公司仍然广泛雇用人员来处理物品,将它们装入袋子和盒子中。
这是因为传统的机器人抓手是由金属和硬塑料制成的,这与精致的物品及其不规则的形状不匹配,极易毁坏物品。如今,工厂里的普通机器人可没办法将鸡蛋打成煎蛋卷,将橙子变成橙汁。
而柔软的机器人抓手似乎是这种问题的最佳解决方案。在过去几年,这种技术发展的确有爆发式的增长。像CSAIL这样的实验室以及像RightHand Robotics这样的商业公司都参与了这项活动,他们开发了很多的机器人抓手,比如充气的机器人抓手、豆袋式的机器人抓手、像章鱼触手的机器人抓手等。
Rus说她的新机器人抓手比以往任何设计的解决方案都要好。它的郁金香形状意味着它可以从一定角度接近物体,而不是像别的抓手那样要从侧面抓取物体。因为这个抓手里有折纸骨架,所以它既有力量也有灵活性。
至于为什么这个机器人手还没有被采用,Rus表示,这是因为商业的解决方案还未赶上“实验室的创新”,另一个原因则可能是制度惰性。一旦公司投资昂贵的设备,更换设备则变得非常麻烦,尤其是如果升级硬件意味着要重新安排整个生产线。
但是,毫无疑问,柔软机器人领域会继续有更多奇怪却有用的创新品。Rus说:“据我们所知,这是第一个如此有用的机器人手。”