「像动物一样适应的机器人(This Robot Adapts Like Animals )」论文提出一种智能试错法算法,算法允许机器人快速适应破坏,完全不需要自我诊断或是提前准备应急措施。
对于人类而言,有很多危险的工作,例如扑灭森林火灾,寻找地震废墟下的幸存者,或者是关闭福岛核电站等等。如果这些高危工作能让 AI 来完成,那该有多好!
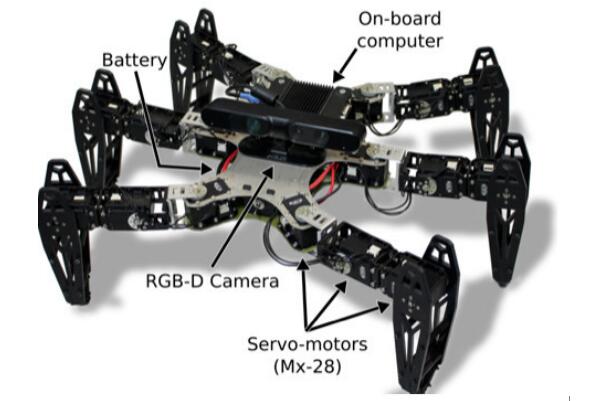
本期介绍的论文中出现了两个机器人:一个六组机器人和一个机械手臂,以此来展示动作方面的智能试错算法。这是是一种快速有效的损坏恢复算法,可以使机器人更加高效和可靠地运行。
与传统强化学习(RL)方法相比,本期介绍的论文更加有效率,机器人上只需要花上几分钟和几次物理试验,而 RL 算法通常必须进行数百次测试才能学会如何完成任务。论文介绍了机器人有一个「模拟童年」(simulated childhood),在这里它学习了移动身体的不同方式,在经过几次测试和大约两分钟后就可以适应。
本期论文跟之前的研究有两个主要区别:
(1)机器人不需要知道损伤是什么,它只需要一种方法来衡量其性能;
(2)我们没有一个大型资料库来指导,遭受各种类型的损害之后应该怎么做。相反,我们的机器人可以像动物那样,自行学会应对各种损害的场景。
在这项研究中,机器人使用自己的模拟,找到成千上万种不同的行走方式。一旦损坏,机器人会进行体验并更新其关于每种可能行为的性能的知识(该更新将通过机器学习算法完成:高斯过程回归)。之前所习得的 13,000 种行为统统变得不管用了,因此,机器人必须利用之前的知识进行下一步操作的可行性测试:在大多数情况下,它会测试少于 10 种行为,以找到一个尽管受到损害仍能正常工作的行为。